ABB IRC5 & IRC5P
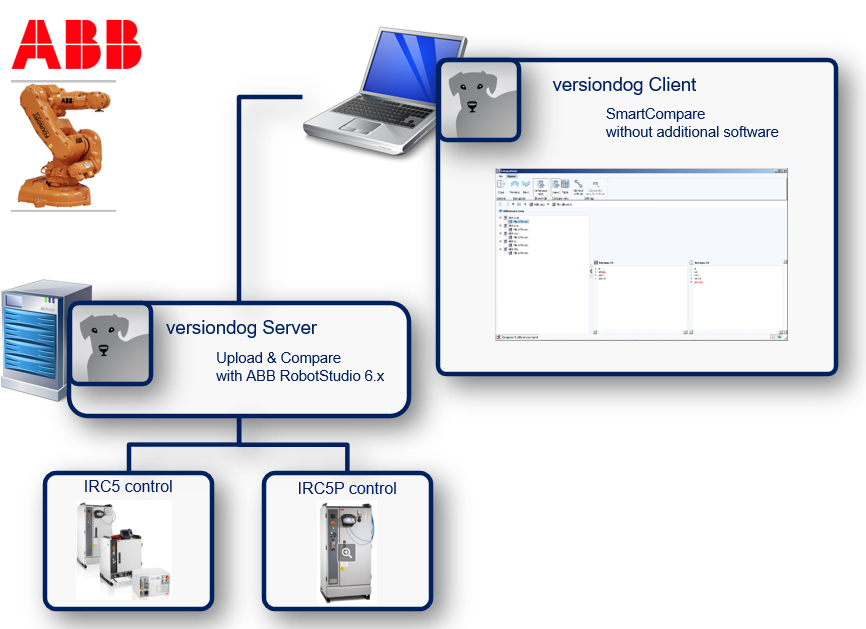
The versiondog system supports the management of ABB IRC5 projects and enables the automatic creation of backups as well as the cyclic monitoring of the robots.
 This tutorial is valid for both IRC5 and IRC5P robots. Since the procedure is identical for both robot controllers, only the designation IRC5 is used for the sake of simplicity.
This tutorial is valid for both IRC5 and IRC5P robots. Since the procedure is identical for both robot controllers, only the designation IRC5 is used for the sake of simplicity.
System compatibility
|
From version |
RobotWare Version |
|---|---|
| versiondog 4.0 | 5.x to 6.02 |
| versiondog 9.0 | 5.x to 7.x |
Requirements
If you want to use the connection type ABB Robotics PC SDK for IRC5 jobs, the following requisites apply:
-
Robot Communication Runtime must be licensed and installed on the versiondog server.
-
DotNet Framework 4.8 must be installed on the versiondog server.
-
The option 616-1 RW-PC Interface must be activated on the robot.
The internal connection paths for the ABB Robotics PC SDK type depend on the firmware used.
-
RobotWare 5.x to 6.2 -> FTP
-
RobotWare 6.03 and newer -> Http
-
RobotWare 7.x and newer -> Http (Https)
Key features and functions
| Automatic change recognition between the program on the device and the current version on the server (backup detailed comparison, version and backup detailed comparison) |
| Clear presentation of complete change history |
| Automatic backup for disaster recovery |
| Component type for ABB robot projects |
|
Devices supported:
|
In this tutorial
Last updated: